コネクテッドマップサービス
正確なワイヤレス位置特定と安全なキーマネージメント
自動運転車両用のコネクテッドマップサービス
自動運転に関しては、自動運転車両が安全かつ確実に道路を走行できるようにするために必要なハードウェアとソフトウェアと同じくらい、サービスが重要です。
車両の接続性が一般的に向上し続ける中で、カメラ、レーダー、超音波などの通常の車両側のセンサーと並んで、より詳細な情報層、地図サービスが重要です。 自動化されたシステムに、より広範囲映像を提供するのサポートします。
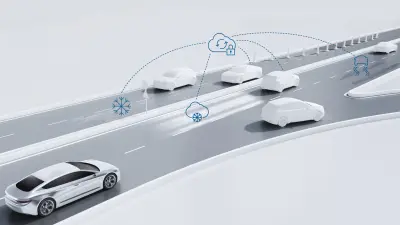
swarm データとインフラストラクチャデータの組み合わせ
接続された車両からの swarm データと、インフラストラクチャからの気象情報などのデータソースを組み合わせて使用することで、運転環境の様々な追加情報に関する非常に正確で最新の情報を提供できます。 また、自身の経験からのみ学ぶヒューマンドライバーとは異なり、コネクテッドマップサービスは、すべてのコネクテッド車両の情報を組み合わせて活用できます。
道路状況の予測向上
他にも複雑な交差点での正確な車線形状と走行軌道、ラウンドアバウトでの最適な走行速度、センチメートル精度での位置合わせに使用できる建物などのランドマーク、道路が現在氷っている正確な位置を示す情報が使用できます。(米国だけでも、気象関係が原因となり年間平均で約 5,000人が死亡し、418,000人以上が負傷しています)
このswarmデータは、 4つの中央マップレイヤ上の ボッシュのクラウドに集約され、マルチレイヤに統合されます。マルチレイヤマップは接続されている車両のベースマップに送信され、車両センサーの情報は強化されます。
走行動作の反映
上記のような信頼性の高いリアルタイム情報を使用することで、最適な運転行動を予測、計画し、運転中に道路状況が変化した場合に適応することができます。 このように、コネクテッドマップサービスは、既存のドライバーアシスタンス機能を向上させるだけでなく、車両やモビリティサービスの開発と改善の新たな可能性を生み出し、将来のモビリティの安全性、効率性、利便性を向上させます。
* 出典: analytiert von Booz Allen Hamilton 、 basierend auf NHTSA-Daten 、 2007年から2016年までの10年間の平均値